Por qué tu suspensión no gestiona el rebote de tu rueda
Durante el uso de la moto, las suspensiones de tu moto están sometidas a una carga de trabajo continua y variable.
Irregularidades del pavimento, cambios de dirección, transferencias de masa en frenada y aceleración. El sistema trabaja sin interrupción.
La suposición generalizada es que la suspensión absorbe y gestiona la totalidad de estos esfuerzos. La realidad es más compleja.
El neumático no es un elemento pasivo del sistema.
Tiene masa, tiene elasticidad propia y genera fuerzas que actúan de forma independiente a la suspensión. Cuando el rebote elástico del neumático se produce desfasado respecto a la trayectoria instantánea de la suspensión, ambos sistemas entran en conflicto. El resultado son fuerzas anómalas de frecuencia y amplitud variables que se transmiten directamente a la suspensión, perturbando su ciclo de compresión y extensión.
La calibración de una suspensión convencional es estática. Resortes, amortiguación y geometría se ajustan para un rango de condiciones determinado. Sin embargo, los esfuerzos reales que recibe la suspensión en rodadura son dinámicos en frecuencia, dinámicos en amplitud y variables en el tiempo. La respuesta del sistema permanece fija mientras el problema que debe gestionar cambia constantemente.
Este desfase entre la rigidez estática del ajuste y la variabilidad dinámica de los esfuerzos genera una zona de trabajo fuera de la calibración óptima.
Una zona donde la suspensión no rinde al nivel para el que fue diseñada, y donde el neumático pierde progresivamente su capacidad de mantener el contacto con el asfalto de forma consistente.
El problema no es la suspensión.
Es que ninguna suspensión convencional puede resolver un problema dinámico con una solución estática.
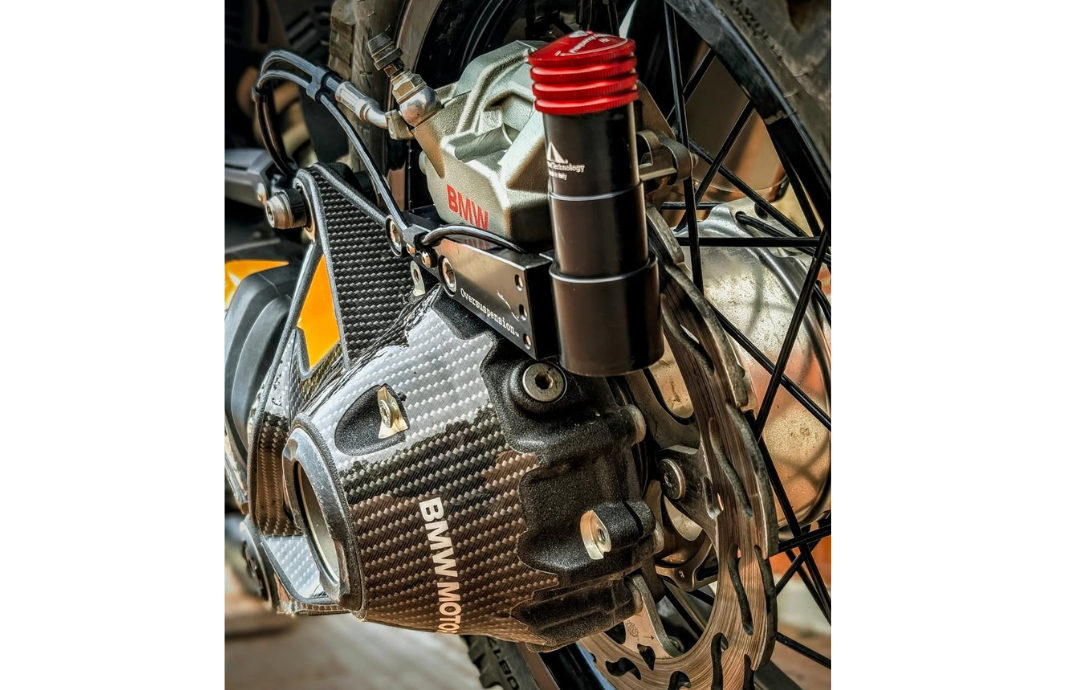
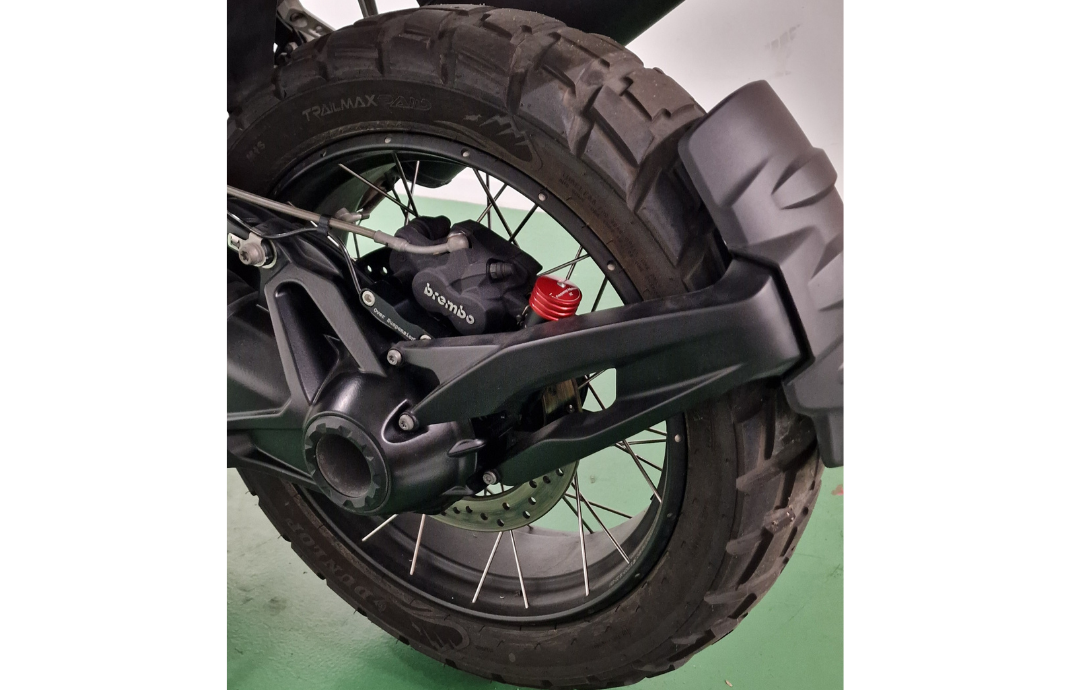
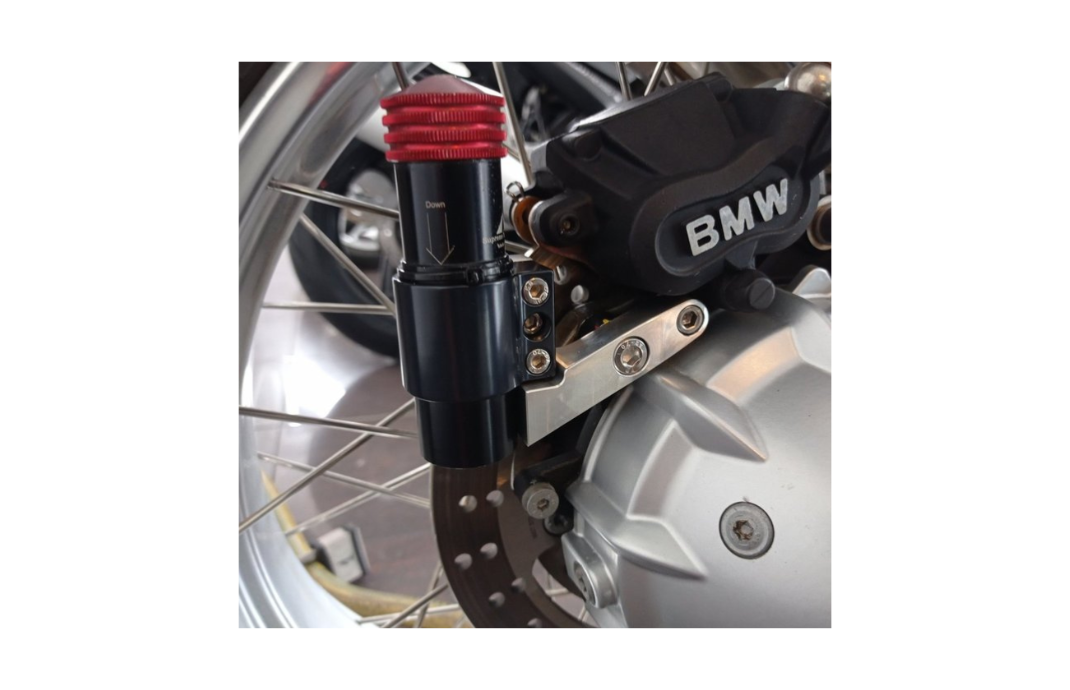
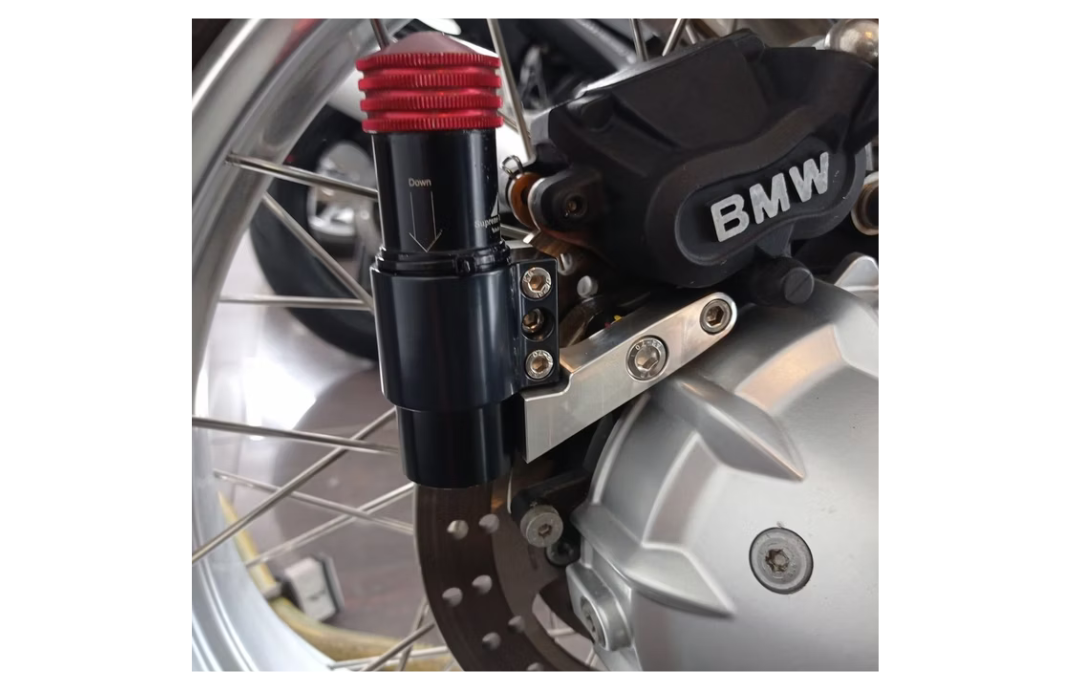
El dispositivo monitoriza en tiempo real las vibraciones generadas por el rebote elástico del neumático.
Cuando detecta un desfase respecto a la trayectoria de la suspensión, interviene de forma activa generando una respuesta en contrafase. Una fuerza de igual amplitud y frecuencia pero de signo opuesto que cancela las fuerzas anómalas antes de que se transmitan al sistema de suspensión.
El resultado es una sincronización continua entre el ciclo del neumático y el ciclo de la suspensión.
A diferencia de la calibración estática convencional, el dispositivo de oversuspension opera en tiempo real y adapta su respuesta a cada variación de los esfuerzos.
Frecuencia alta en pavimento deteriorado, respuesta progresiva en cambios de trayectoria, actuación inmediata ante impactos puntuales. El sistema no tiene un ajuste fijo porque el problema que resuelve no es fijo.
Las consecuencias prácticas son directas y medibles:
El neumático mantiene el contacto con el asfalto de forma consistente al eliminarse las fuerzas que provocan su despegue momentáneo. La suspensión trabaja dentro de su rango de calibración óptimo al no recibir los inputs anómalos que la sacan de su ciclo de diseño.
El conjunto moto-piloto gana estabilidad en las situaciones donde los sistemas convencionales empiezan a quedarse cortos: asfalto irregular a ritmo elevado, frenadas comprometidas, curvas con variaciones de adherencia.
Oversuspension no mejora la suspensión. Resuelve lo que ninguna suspensión, por sí sola, puede resolver.